NU32v2: Introduction to the PIC32
THIS PAGE REFERS TO A PRE-RELEASE VERSION OF THE NU32 PIC32 DEVELOPMENT BOARD. FOR INFORMATION, SAMPLE CODE, AND VIDEOS RELATED TO THE PRODUCTION VERSION (2016 AND LATER), AND TO THE CORRESPONDING BOOK "EMBEDDED COMPUTING AND MECHATRONICS WITH THE PIC32 MICROCONTROLLER," VISIT THE NU32 PAGE.

The Microchip PIC32 is a family of complex and powerful microcontrollers that can be purchased for less than $10 in quantities of one. This microcontroller offers many peripherals useful for mechatronics purposes, such as several channels for analog-to-digital conversion, digital I/O, synchronous and asynchronous serial communication, pulse width modulation, etc. For our purposes, the primary advantages of the 32-bit PICs over the 8-bit PICs we have used in the past are that they are faster (max clock rate of 80 MHz compared to 40 MHz), have more peripherals available, offer more program memory (flash) and data memory (RAM), and have significantly more computational horsepower due to the 32-bit address and data buses and single-cycle multiply for 32-bit math. The primary disadvantages are that they come only in surface mount packages, making them harder to work with for fast prototyping compared to the DIP (dual-inline packages) 8-bit PICs that can be plugged into a breadboard; and they must be powered by 2.3-3.6 V, unlike the 5 V of DIP 8-bit PICs and some DIP chips we would like to interface with. (Of course surface mount and lower operating voltages are vastly superior for commercial embedded products, and we will find ways to work around the disadvantages mentioned.)
Particular numbers referenced on this page refer to the PIC32MX795F512L chip, which is the PIC32 used on the NU32v2 board. (You may wish to compare the capabilities of our PIC to others on the Microchip PIC32 parametric table.) The NU32v2 development board is shown at right. The NU32v2 board was designed by Nick Marchuk to easily plug into two standard prototyping breadboards, allowing easy prototyping with the PIC32. The NU32v2 board also has two voltage regulators, a DC input jack, a USB connector, an FT232RL serial-to-USB converter, and two LEDs to allow you to get up and running quickly with only the assembled NU32v2 board, a USB cable, a DC power supply, and a PC with free software downloaded from Microchip (once a "bootloader" is installed on the PIC to allow you to program it from your PC). The NU32v2 board was created with inspiration from the UBW32 board and the NU32 designed by NU graduate student Andy Long.
The purpose of this page is to provide a brief overview of PIC32 and NU32v2 hardware. Microchip provides many reference manuals, data sheets, application notes, and sample software, and there are many other helpful web resources to take you further.
See the
- NU32v2: What is in the NU32v2 Kit,
- NU32v2: Software to Install,
- NU32v2: Starting a New Project, and
- NU32v2: A Detailed Look at Programming the PIC32
pages for information specific to programming the NU32v2.
PIC32 Hardware Overview

Our PIC32MX795F512L features a max clock frequency of 80 MHz, 512K program memory (flash), 128K data memory (RAM), multiple interrupt sources and handling routines, 16 10-bit analog-to-digital input lines (multiplexed to a single ADC), many digital I/O channels (with outputs that can be configured for open-drain), USB 2.0, Ethernet, five I2C and four SPI synchronous serial communication modules, six UARTs for RS-232 or RS-485 asynchronous serial communication, five 16-bit counter/timers (configurable to give two 32-bit timers), five pulse-width modulation outputs, and a number of pins that can generate interrupts based on external signals, among other features. This PIC has 100 pins.
To cram this much functionality into 100 pins, many of the pins serve multiple functions. For example, pin 20 can serve as a comparator input, an analog input, a change notification input which can generate an interrupt when the pin changes state, or a digital input or output. Which function a particular pin serves is determined by "Special Function Registers" (SFRs) that contain configuration bits specifying the desired use of the pin. Typically your program sets these configuration bits at the beginning of execution, and the functions of the pins are fixed while your program runs. (It is possible, though rarely needed, to change the configuration bits and change the function of pins on the fly.)
A figure showing the pin-out of the PIC32MX795F512L is shown at right. Shaded pins tolerate up to 5.5 V as inputs. All pins are brought out to the pins of the NU32v2 board, except for pins 63 and 64 (OSC1 and OSC2, to the external oscillator), pins 54 and 55 (VBUS and VUSB, brought out to pads), and pin 85 (VDDCORE). Click on the image for higher resolution.
Below the different pin functions are briefly summarized. The most important functions for ME 333 are indicated in bold. To learn more about these functions, you can consult the data sheet, but for the most part you will learn how to use these functions by modifying sample programs. See also the Further Reading section at the bottom of the page.
| Pin Label | Function |
|---|---|
| ANx (x=0-15) | analog-to-digital (ADC) inputs |
| AVDD, AVSS | positive supply and ground reference for ADC |
| BCLK1, BLCK2 | clocks for infrared (IrDA) comm encoding and decoding for 2 UARTs |
| CxIN-, CxIN+, CxOUT (x=1,2) | comparator negative and positive input and output |
| CLKI, CLKO | clock input and output (for particular clock modes) |
| CNx (x=0-21) | interrupts generated on change of these inputs |
| CVREF-, CVREF+, CVREFOUT | comparator reference voltage low and high inputs, output |
| D+, D- | USB communication lines |
| EMUCx, EMUDx (x=1,2) | used by an in-circuit emulator (ICE); not relevant in ME 333 |
| ENVREG | enable for on-chip voltage regulator that provides 1.8 V to internal core (set to VDD to enable on NU32v2) |
| ICx (x=1-5) | input capture pins for measuring frequencies and pulse widths |
| INTx (x=0-4) | pins used to generate external interrupts |
| MCLR (overbar) | master clear reset pin, resets PIC when low |
| OCx (x=1-5) | "output compare" pins, usually used to generate pulse trains (pulse width modulation) or individual pulses |
| OCFA, OCFB | fault protection for output compare pins; if a fault occurs, can be used to make OC outputs be high impedance (neither high nor low) |
| OSC1, OSC2 | crystal or resonator connections for different clock modes |
| PGCx, PGDx (x=1,2) | used with in-circuit debugger (ICD) |
| PMALL, PMALH | latch enable for parallel master port |
| PMAx (x=0-15) | parallel master port address |
| PMDx (x=0-15) | parallel master port data |
| PMENB, PMRD, PMWR | enable and read/write strobes for parallel master port |
| Rxy (x=A-G,y=0-15) | digital I/O pins |
| RTCC | real-time clock alarm output |
| SCLx, SDAx (x=1-5) | I2C serial clock and data input/output for I2C synchronous serial communication modules |
| SCKx, SDIx, SDOx (x=1-4) | serial clock, serial data in, out for SPI synchronous serial communication modules |
| SS1, SS2 (overbar) | slave select (active low) for SPI communication |
| TxCK (x=1-5) | input pins for counters when counting external pulses |
| TCK, TDI, TDO, TMS | used for JTAG debugging |
| TRCLK, TRDx (x=0-3) | used for instruction trace controller |
| UxCTS, UxRTS, UxRX, UxTX (x=1-6) | UART clear to send, request to send, receive input, and transmit output for UART modules |
| VDD | positive voltage supply for peripheral digital logic and I/O pins (3.3 V on NU32v2) |
| VDDCAP | capacitor filter for internal 1.8 V regulator when ENVREG enabled |
| VDDCORE | external 1.8 V supply when ENVREG disabled |
| VREF-, VREF+ | can be used as negative and positive limit for ADC |
| VSS | ground for logic and I/O |
| VBUS | monitors USB bus power |
| VUSB | power for USB transceiver |
| VBUSON | output to control supply for VBUS |
| USBID | USB on-the-go (OTG) detect |

The figure at right is a block diagram of the architecture of the PIC32. The CPU (which operates at 1.8V, provided by a voltage regulator internal to the PIC32 as it's used on the NU32v2 board) interfaces with data memory (RAM) and the program flash memory (along with USB, CAN, ethernet, a direct memory access controller, and in-circuit debugger and JTAG interfaces that can be used for programming and debugging purposes). It also interfaces with peripherals, which are what make microcontrollers useful for embedded control. These peripherals consist of PORTA ... PORTG, which are digital I/O ports; five 16-bit counters (can create 32-bit counters by chaining) that can be used for a variety of counting operations, and timing operations by counting clock ticks; analog-to-digital converter (ADC) multiplexed to 16 input pins; a real-time clock and calendar (RTCC) that can maintain accurate year-month-day-time; two comparators that compare which of two inputs has a higher voltage; six UARTs for asynchronous serial communication (e.g., RS-232, RS-485); a "parallel master port" (PMP) for parallel communication; five I2C and four SPI synchronous serial communication modules; five pins for "input capture", where interrupts can be triggered by rising or falling edges; five pins for pulse-width modulation (or "output compare"); and 22 change notification pins to generate interrupts when signals change.
Note that the peripherals are on two different buses: one is a bus clocked by the system clock SYSCLK, and the other is clocked by the peripheral bus clock PBCLK. These may be the same frequency, or PBCLK may be a lower frequency, depending on how you set clock configuration bits. The top of the figure shows the timing generation, which uses either an external crystal or timing circuit (for more accurate timing), or an internal circuit, to create SYSCLK, PBCLK, and 48 MHz USBCLK (which is used for USB communication). The NU32v2 board uses an external 8 MHz crystal oscillator to generate a SYSCLK and PBCLK of 80 MHz using a phase-locked loop (PLL) to multiply the frequency. This is set by the software, as discussed below, not by the physical design of the board. If the Watchdog Timer is used by your program, your program must periodically reset the timer counter. Otherwise the PIC will reset. This is a way to have the PIC recover and restart if your program has entered an unexpected state.
The CPU also interfaces with a "pre-fetch (cache) module." This module fetches blocks of program instructions from flash program memory in advance of their use by the CPU, to try to limit delays due to relatively slow flash memory.
NU32v2 Development Board Overview

Here is a schematic of the NU32v2 development board, showing how the PIC32MX795F512L is used on the board, and showing which pins are made available to the user. The board layout is shown at right as and can be clicked on to view a high resolution image. It is also available as a pdf file. The mapping from the 88 pins on the NU32v2 board to pins on the PIC32 is also shown in the figure below. In total, 82 PIC32 I/O pins are carried to the NU32v2 board pins.
Some of the features of the NU32v2 board are highlighted in this image.
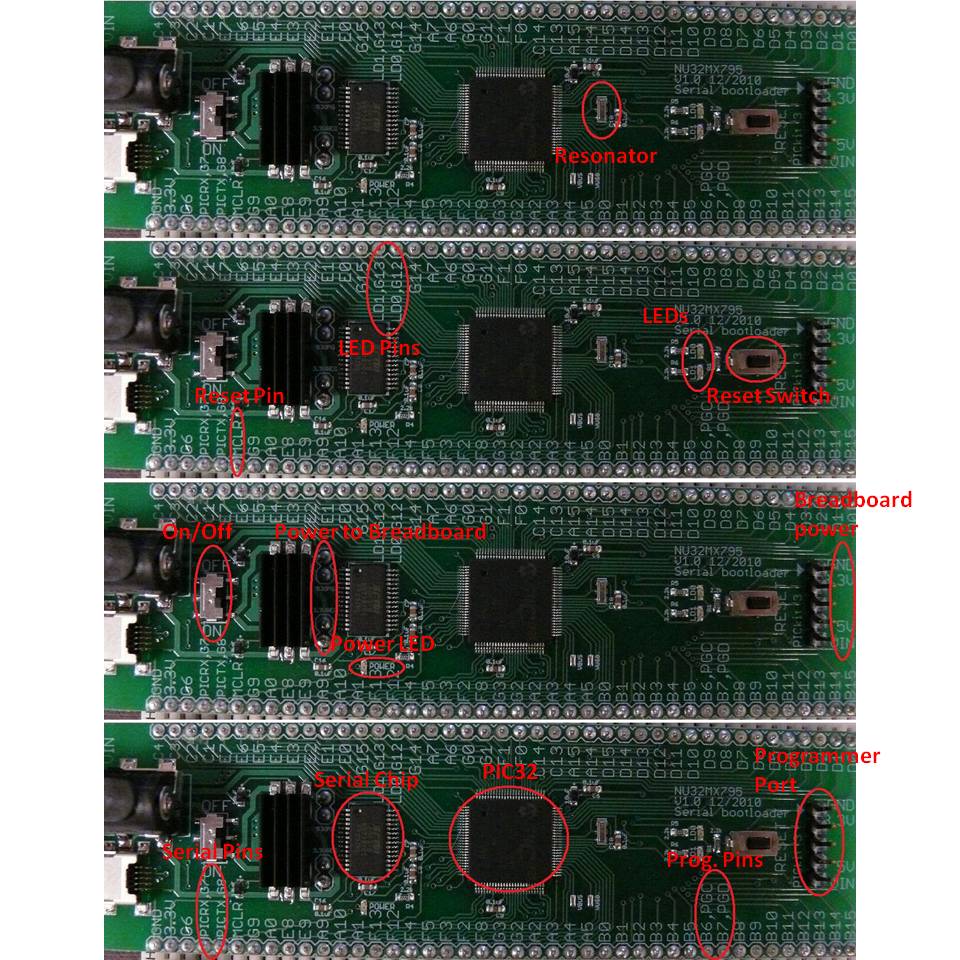{kind=link}
Options for powering the NU32 board:
- Plug a power jack (2.1 mm ID, 5.5 mm OD, center positive, >6.4V, <15V) into the barrel connector on the board and slide the power switch to side labeled 'ON' (toward the USB connector side of the board).
NOT RECOMMENDED: * Short the bare pads on the bottom of the board to bypass the 5V regulator and use the 5V from your computer to power the board. The USB cable provides a typical current supply of around 500 mA. IF YOU USE THIS METHOD, COVER THE POWER JACK WITH TAPE SO THAT YOU DO NOT ACCIDENTALLY PLUG IN AN EXTERNAL POWER SUPPLY
Note on using the 3.3V and 5V output pins: The DC power supply that comes with the NU32v2 kit provides 9V at about 660 mA total. Take this into account when you decide how much current to try to draw from these pins. Even if the NU32v2 board is powered by a higher-current supply, such as a battery or a higher voltage wall-powered adapter brick, keep in mind that the onboard 5V and 3.3V regulator can only source approximately 800 mA. You should not try to draw more than, say, half that. Usual rule of thumb: don't try to drive motors, which often draw hundreds of mA, up to a few amps in typical ME 333 applications, using current flowing through your NU32v2 board. The 5V and 3.3V regulators are connected by a black heat sink. When powered with a 9V supply, the 5V regulator drops 4V. When you draw 200 mA, the 5V regulator will give off 800 mW of heat. THE HEAT SINK WILL BE WARM, AND WILL GET HOT AS YOU DRAW MORE CURRENT. This is normal, but take care to not draw too much current from your 5V or 3.3V rails.

Further Reading
You can find some code snippets and circuit suggestions here. There are many references out there to learn more about the hardware and programming of the PIC32. Some of these are more accessible than others. A good book that discusses both the hardware and programming of the PIC32 at an introductory to intermediate level is DiJasio's Programming 32-bit Microcontrollers in C: Exploring the PIC32. It was published in 2008, soon after PIC32's were released. It does not make use of many peripheral library functions, but instead provides low-level code to develop your own libraries. Still, it is a good first book to understand how the PIC32 works.
The most useful Microchip reference documents are:
- PIC32 Family Reference Manual, by chapter. Lots of useful and detailed information on the PIC32 architecture and how the peripherals work, including detailed description of their SFRs.
- "short" PIC32 Data Sheet (254 pages, 5 MB pdf): Has overlap with the Reference Manual, but the Reference Manual contains some information you can't find here, and the Data Sheet contains some information you can't find in the Reference Manual.
You can also visit the Microchip documentation page.
To better understand how to program the PIC32, your best bet is to modify sample code in the Microchip distribution (see in particular the code in C:\Program Files\Microchip\MPLAB C32\examples\plib_examples), help files in C:\Program Files\Microchip\MPLAB C32\doc, on this wiki, and elsewhere on the web. You might also wish to look at some of the many Microchip Application Notes. You can also look at the peripheral source code to see what exactly the peripheral libraries do in the cases that the functions are not completely described in the help files. The MPLAB C32 C Compiler User's Guide (122 page pdf) contains information on programming the PIC32 in C, and the MPLAB C32 Libraries Manual (150 page pdf) discusses some standard C libraries as well as libraries for functions such as Fast Fourier Transforms, FIR and IIR filters, and functions on arrays.
As you find other useful resources for programming, feel free to add them here!